
Project Description

高精度非接触式位移测量
为了高精度测量位移,SmarAct提供了PICO SCALE干涉仪。
- 一台仪器中有 3 台平行激光干涉仪,用于 3D 测量
- 测量带宽高达 2.5 MHz(10 MHz 采样率),分辨率低至 1 pm1
- 可对大多数材料(塑料、玻璃、金属甚至水)进行测量
- 适用于不同应用和环境(包括真空和低温)的各种传感器头
- 可通过可选模块扩展到完整的实验室测量和控制仪器
- 久经考验的性能,拥有 100 多名满意的客户
________
1 在频域中分析周期性位移时
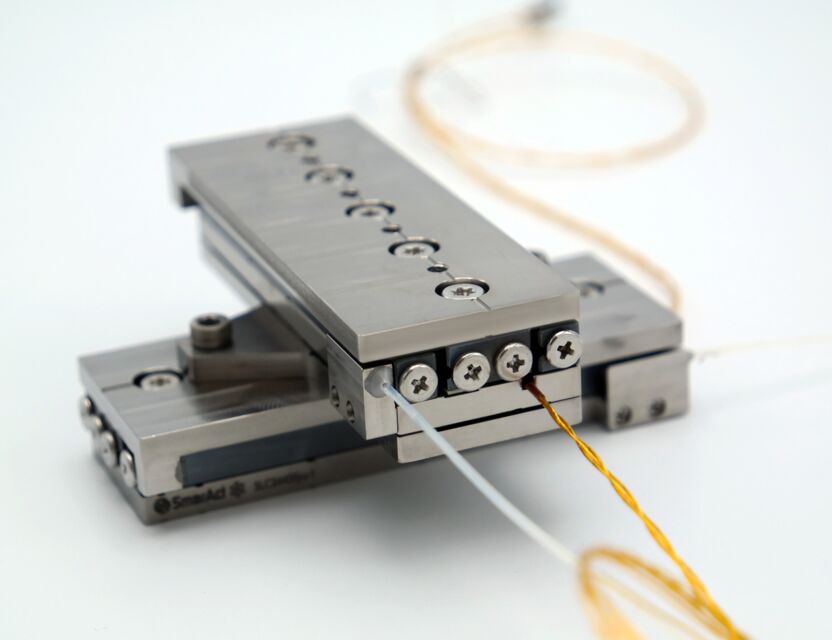
PICOSCALE传感器探头是执行高分辨率位移测量的必备设备。在探头内,探头和参考光束会干涉,干涉图案包含有关目标镜位置的信息。目前,SmarAct提供三类具有不同光束几何形状的传感器探头,专为各种应用而设计。
由于SmarAct在内部设计和制造所有产品,因此我们可以有效地设计和生产定制的传感器探头。这包括将PICOSCALE传感器探头集成到SmarAct的精密定位系统中,并根据您的需求定制具有特定属性的解决方案。请联系SmarAct的直接和灵活的客户支持。
传感器探头 及 选型
|
Product data sheet
|
C01
|
C03
|
C04
|
F01
|
L01
|
|
传感器探头
|
|||||
|
光束形状
|
准直光
|
聚焦光
|
线型聚焦光
|
||
| 焦距【mm】 |
10 (可定制)
|
30 或 50
|
|||
|
束腰直径【μm】
|
400
|
1590
|
350
|
28 *
|
50 x 1590
|
|
工作距离【mm】
|
13 ~ 650
|
13 ~ 5000
|
13 ~ 500
|
10 ± 0.5 *
|
± 10
|
|
角度工作范围【°】
|
± 0.05
|
± 0.013
|
± 0.075
|
± 2 *
|
± 1.3 along focused axis
|
|
环境兼容性
|
|||||
|
典型目标
|
反射镜
|
反射镜,反射器
|
反射镜
|
小样品
|
圆柱形样品
|
|
机械尺寸
|
|||||
|
尺寸 【mm】
|
4 x 13 (Ø x L)
|
6 x 21 (Ø x L)
|
4 x 13 (Ø x L)
|
6 x 21 (Ø x L)
|
9 x 26 (Ø x L)
|
技术参数规格
|
Product data sheet
|
C01
|
C03
|
C04
|
F01
|
L01
|
|
传感器探头
|
|||||
|
光束形状
|
准直光
|
聚焦光
|
线型聚焦光
|
||
| 焦距【mm】 |
10 (可定制)
|
30 或 50
|
|||
|
束腰直径【μm】
|
400
|
1590
|
350
|
28 *
|
50 x 1590
|
|
工作距离【mm】
|
13 ~ 650
|
13 ~ 5000
|
13 ~ 500
|
10 ± 0.5 *
|
± 10
|
|
角度工作范围【°】
|
± 0.05
|
± 0.013
|
± 0.075
|
± 2 *
|
± 1.3 along focused axis
|
|
环境兼容性
|
|||||
|
典型目标
|
反射镜
|
反射镜,反射器
|
反射镜
|
小样品
|
圆柱形样品
|
|
机械尺寸
|
|||||
|
尺寸 【mm】
|
4 x 13 (Ø x L)
|
6 x 21 (Ø x L)
|
4 x 13 (Ø x L)
|
6 x 21 (Ø x L)
|
9 x 26 (Ø x L)
|

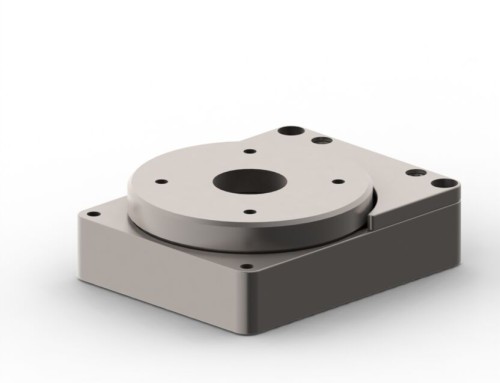
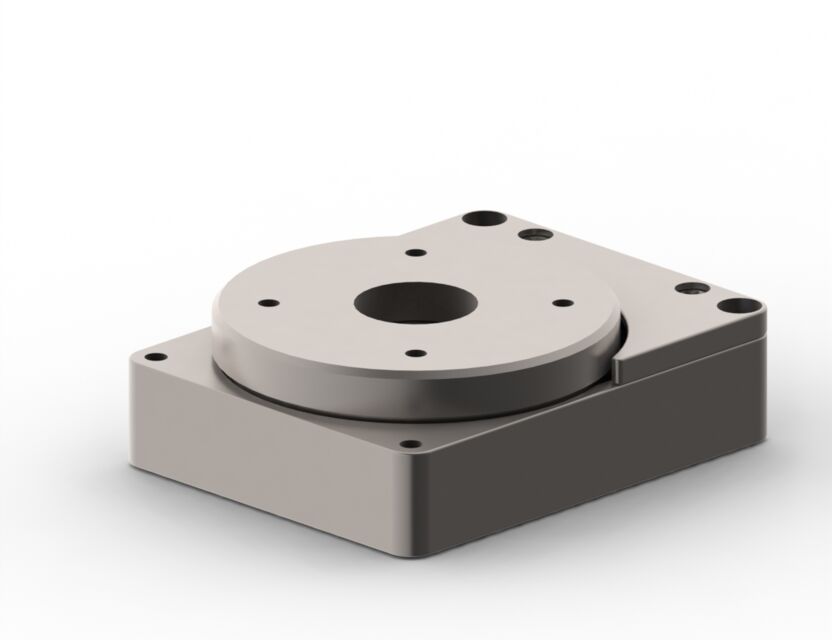
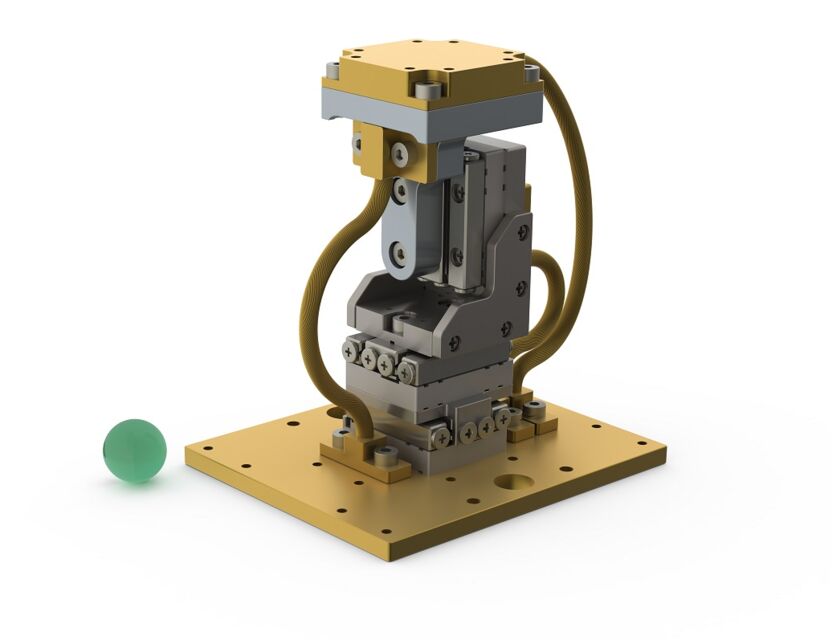
平移台的直线度测量
平移台的直线度测量是PICO SCALE干涉仪的典型应用之一。紧凑且易于对准的传感器头以及使用轻质目标的可能性,即使在没有高负载的小载物台上也能实现性能表征。
PICOScale 传感器头组件在预先对准的安装座中带有三个传感器头,与轻巧的 1 英寸镜子对齐。镜像使用适当的适配器固定在转换台上。在PICO SCALE计算系统中,三个传感器头的信号被处理为直接输出镜子的俯仰和偏航。

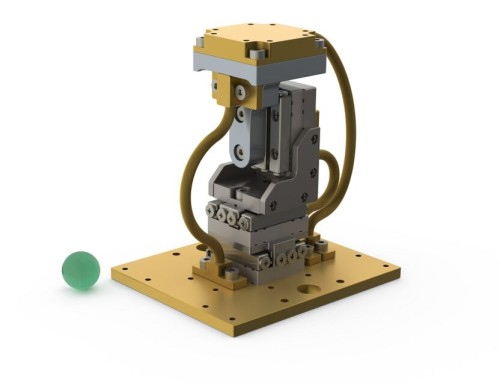
具有干涉精度的闭环位置控制
样品的准确定位是当今高精度制造和研究的核心挑战之一。标准方法是使用具有集成位置反馈的高精度定位系统来控制位置。但是,样品可以安装在离集成传感器很远的地方,因此无法以所需的精度控制可能的漂移。
PICOSCALE干涉仪可用于测量(或至少非常接近)兴趣点(POI)。由于分辨率和精度通常远远超过在玻璃刻度上使用周期性模式的线性编码器,因此可以将样品定位的精度提高到一个新的水平。
使用SmarAct SI接口,位置数据可以直接发送到SmarAct的模块化控制系统MCS 2,该系统可以使用数据进行直接和低延迟反馈来控制SmarAct定位器。

带玻璃窗的录音
本应用笔记描述了使用聚焦传感器头在玻璃窗上进行的原理验证测量。由于声音,玻璃在纳米尺度上移动。例如,在位移数据中可以清楚地识别人声。数据流直接流式传输到文件中,后处理非常简单。
Your Content Goes Here
迈克尔逊干涉仪配置方案
标准方案

正面参考 – 环顾四周 配置

作为变型,分束器可以涂覆在分束器立方体的前表面上。这在具有某些空间限制的装置中可能具有优势,因为传感器探头可以“环顾四周”。
外部基准 – 差分测量 配置方案

SmarAlign窗口



迈克尔逊干涉仪的优点
 经典位移测量干涉仪的光学响应遵循正弦形状。图中显示了典型信号。如果总位移非常有限,则可以有效地使用这种信号,从而有可能保持干涉仪的工作点固定:在蓝色椭圆指示的区域中,相对于位移变化的信号变化非常高。另一方面,它在用红色椭圆指示的区域中接近于零。因此,在正弦波的极值中,干涉仪对位移的灵敏度为零!此外,位移方向的信息也会丢失。
经典位移测量干涉仪的光学响应遵循正弦形状。图中显示了典型信号。如果总位移非常有限,则可以有效地使用这种信号,从而有可能保持干涉仪的工作点固定:在蓝色椭圆指示的区域中,相对于位移变化的信号变化非常高。另一方面,它在用红色椭圆指示的区域中接近于零。因此,在正弦波的极值中,干涉仪对位移的灵敏度为零!此外,位移方向的信息也会丢失。
正交检测:生成两个信号

为了规避经典干涉仪的上述缺点,可以使用一种称为正交检测的技术:产生两个信号,其中一个与正弦函数成正比,另一个与余弦成正比。这样,一次获得两个正交的信号,这样每次其中一个信号处于极值点时,另一个信号都有其最高斜率。
有几种技术可以获得正交信号,包括:
→使用极化自由度获得相移信号
→正弦波长调制,其中正交通过干涉仪信号的光谱边带显示。这是PICOSCALE所基于的技术。
正交检测:李萨如图

当两个正交信号相互绘制时,得到李萨如图。这是由在圆上移动的向量形成的。矢量的角度给出了一个干涉仪条纹的分数,通过计算整圈,可以跟踪宏观运动。此外,还显示了运动方向。如果距离增加,矢量顺时针旋转,如果距离减小,矢量逆时针旋转。
总之,正交检测允许以微观分辨率跟踪宏观运动 – 包括方向。
迈克尔逊干涉仪
 迈克尔逊干涉仪可能是最受欢迎的干涉仪架构。激光束在分束器上被分成参考和测量臂。两个部分光束都在参考镜和目标镜上反射1,并在分束器处重新组合。
迈克尔逊干涉仪可能是最受欢迎的干涉仪架构。激光束在分束器上被分成参考和测量臂。两个部分光束都在参考镜和目标镜上反射1,并在分束器处重新组合。

重新组合的光束会干涉并包含有关目标位置的信息。干涉仪信号是理想的正弦波,即使两个臂中的一个有损耗2.正交检测在李萨如图中给出一个圆。
1在PICOSCALE中,参考反射镜可以直接镀覆到分束器立方体的一个表面上,以获得尽可能高的固有稳定性。
2典型的损耗来源仅部分反映了目标或未对齐的设置。
法布里-珀罗干涉仪

法布里-珀罗干涉仪是一种非常简单的干涉仪,仅由两个部分反射表面组成。感兴趣的干涉光束由下式
给出
→第一面镜子直接反射的光束
→ 通过第一面镜子传输,从第二面镜反射,并再次通过第一面镜子传输的光束

如果干涉仪只由这两个光束组成,那么一个也会得到一个完美的正弦波。然而,很明显,第二束光束也会再次从第一面镜子反射,并执行额外的往返,从而导致失真。
仅对于非常小的参数集,即第一镜和第二镜的反射率,干涉仪信号可以近似为正弦波。不幸的是,这组参数是针对非常低的反射率(个位数%范围)给出的,因此必须注意没有额外的反射会干扰干涉仪。
李萨如图和周期非线性
 在李萨如图中,非完美干涉仪被比作一个完美的圆。
在李萨如图中,非完美干涉仪被比作一个完美的圆。
 偏差清晰可见,并会导致+/- 10 nm量级的周期性非线性。理想的迈克尔逊干涉仪不会显示这些偏差。
偏差清晰可见,并会导致+/- 10 nm量级的周期性非线性。理想的迈克尔逊干涉仪不会显示这些偏差。
优化精度的方法
尽管使用标准方法可以达到单纳米级位移测量精度,但高精度应用需要尽可能高的精度。有几种方法可以提高准确性:
信号校正
→ 存在非常强大和快速的算法来正确缩放和移动李萨如图。这对于考虑正交信号的不同幅度和偏移是必要的
→ 两种干涉仪类型,迈克尔逊和法布里-珀罗都受益于这些方法。
查找表补偿
→可以在初始化过程中测量周期性非线性并使用查找表进行补偿。
→ 动态更新查找表非常困难;因此,它通常只能在初始化过程中完成,而在法布里-珀罗干涉仪中,它不会考虑测量过程中目标反射率或对准偏差的任何变化,因为这会改变李萨如图的形状,导致较大的周期性非线性。可能需要重新初始化。
→ 在迈克尔逊干涉仪中,周期性非线性的来源不同,通常更具确定性,并且对目标未对准或测量条件的其他变化非常不敏感。设置的未对齐只会改变李萨如图的大小,而不会改变其形状。信号校正将重新缩放李萨如图。


{kind=link}
{kind=link}
{kind=link}