

SmarAct公司-SMARGON微型机器人

SMARGON介绍
在选择用于科学和工业的定位设备时,高精度、坚固性和可靠性是首要考虑的因素。SmarAct 设计了一种具有六个自由度的机器人定位系统,可用于实验或微装配装置中的各种定位任务。其紧凑的设计带来纤细的轮廓,即使在有限的空间内也能实现大的旋转角度。通过智能自动校准程序,它可以为所有旋转轴实现个位数微米范围内的球形混动范围。
SMAR GON是一种具有六个自由度的定位系统,基于串联和并联运动学的组合,安装在重型旋转台上,定义了设备的 ω 轴。该旋转台可以是直接驱动位移台或压电驱动平台。复杂的混合运动学方法允许末端执行器(也可以是一个组件或另一个重达 50 克的有效负载)在 X、Y 和 Z 方向上定位,并在 χ、φ 和 ω 方向上旋转。SMARGON 控制系统计算部分并行运动学变换,允许直接定位末端执行器,从而使姿势教学变得一项简单的任务。与 MCS2 模块化控制系统的兼容性保证了轻松集成到现有控制环境中,并以直观的方式命令定位系统。
设计
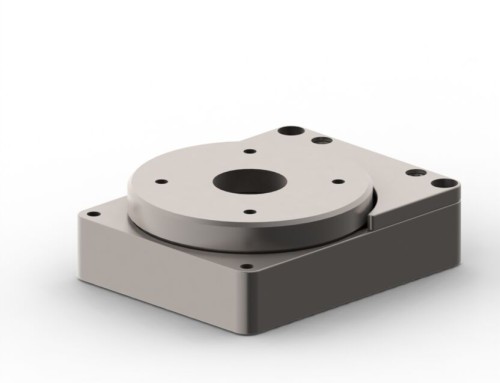
SMARGON 由安装在重型旋转台顶部的具有五个自由度的定位系统组合组成。压电驱动旋转台或高精度空气轴承可用于定位系统的 ω 旋转。五轴定位台允许所研究的样品在 X、Y 和 Z 方向上定位,并在 χ 和 φ 方向上旋转。SMARGON 控制系统计算部分并行运动学变换,从而允许在光束中直接定位和对准。在其标准配置中,前端安装有磁性样品架,为装载和卸载不同样品提供了快速便捷的方式。
这款高精度定位系统专为 X 射线衍射实验而设计。因此,SmarAct特别关注SMARGON定位系统的六个自由度。
SMARGON整体紧凑且占地面积小,有助于极大限度地减少自阴影效应。这还使得 X 射线检测器可以放置得更靠近样品,从而检测到更大部分的衍射锥。SmarAct 还能够提供真空兼容版本或完全由非磁性材料制成的 SMARGON。
整个装置的混动范围代表了整体性能,并且很大程度上取决于每个单独定位平台的精度。因此,每个位移台都精确对准,以确保组合多轴系统中的协同作用。此外,通过可用的校准套件进行的复杂校准为系统运动控制器中实施的主动补偿例程奠定了基础。下表概述了成功校准后在现场操作期间确定的系统规格。
ω |
χ |
φ |
X |
Y |
Z |
|
|---|---|---|---|---|---|---|
| Travel Range | unlimited | 0° – 90° | unlimited | ± 2 mm | ± 2 mm | ± 2 mm |
| Sphere of Confusion [µm] | < 1 | < 7 | < 7 | — | — | — |
| Resolution of Motion | < 100 µ° | < 20 µ° | < 20 µ° | < 5 nm | < 5 nm | < 5 nm |
| Velocity | 180 °/s | 10 °/s | 80 °/s | ~ 10 mm/s | ~ 10 mm/s | ~ 10 mm/s |
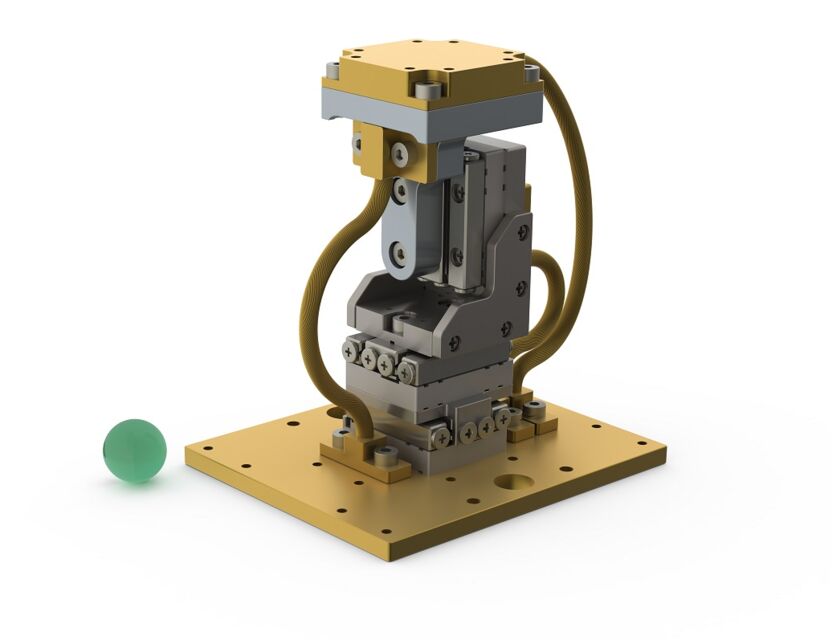
校准套件
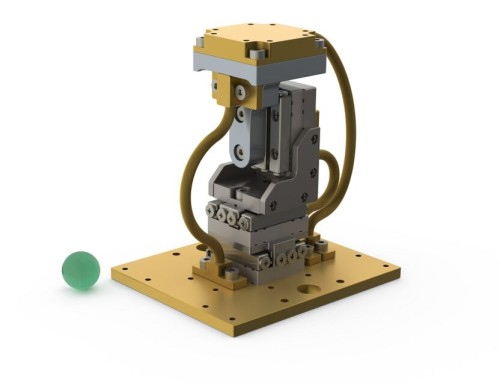
校准套件由硬件和软件部分组成,两者均设计用于自动测量与理想旋转的偏差并计算将存储在 PMAC 中的补偿参数。硬件部分包括配备陶瓷球作为测试对象的校准样品。当校准样品由 SMARGON 旋转时,带有力传感器的三维定位系统用于测量陶瓷球的横向位移。复杂的程序可确保定位系统在几分钟内完成校准。
应用领域
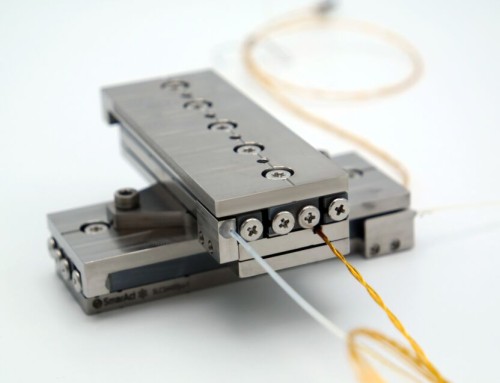
使用 SmarAct 抓取系统作为末端执行器,SMARGON 可以转换为多功能机器人搬运系统。然后可以将机器人放置在 SLL 系列的长线性位移台导轨系统上,为精确的材料和样品处理任务创建理想的解决方案。
它不仅可以用于从样品存储到分析系统或显微镜的样品运输,而且还可以兼作需要高样品通量的实验室的主要样品台,从而产生额外的协同效应。
SMARGON 的根源可以在同步加速器 XRD 应用中找到。但从设计的基础来看,我们发现了一种通用设备,可以将其描述为并行和串行运动定位系统的混合体。
SMARGON 的运动学允许在三个维度上平移并围绕其工作空间中的可定义点进行同心旋转,它不仅是一种科学工具,而且还是一种适用于其他应用领域的多功能机器人搬运系统。
如果另外安装一个接受 SEM 存根的插座作为末端执行器,SMARGON 就会变成一个具有六个自由度和非常薄轮廓的高精度 SEM 样品台。
由于高真空和超高真空兼容版本的可用性,它还可以用作俄歇或光电子能谱或其他需要真空条件的分析技术的样品操纵器。
将高精度定位与大行程相结合,开辟了新的应用领域。
获得灵感并与我们的应用科学家开始讨论高精度机器人技术。



{kind=link}
{kind=link}
{kind=link}